
Something that I’ve been trying to figure out what to do with is my affinity for random geometric problems (e.g. staring at a half-covered design on a random pizza box and realizing that the lines of the “pizza slices” do not intersect at the center of the arc in which they lie).
Today, I was pondering over the toroidal map type in Civilization. The game still plays on a planar rectangular projection of the map, but how much distortion should there really be?
I’m going to assume that the width of the map is the maximum latitudinal circumference around the outside, and therefore I am interested in how much narrower the “poles” should really be to meet each other on the inside of the torus.
My initial condition therefore is that [map width] = 2 * pi * ([major radius] + [minor radius]) and that [map height] = 2 * pi * [minor radius].
I am interested in the minimum latitudinal circumference, described by 2 * pi * ([major radius] – [minor radius]).
After some very basic algebra, the conclusion is that the poles should be only as wide as [map width] – 2 * [map height], a significant result! The distortion is quite severe for maps of appreciable height!
If a toroidal Civ map was twice as wide as it was tall, the poles would all still come to a single point, which is not much actual space for units and cities placed up there. Though, if we had to play on Civ maps where distance was physically accurate given the 3D shape of the world, it’d probably be even more confusing to keep track of.
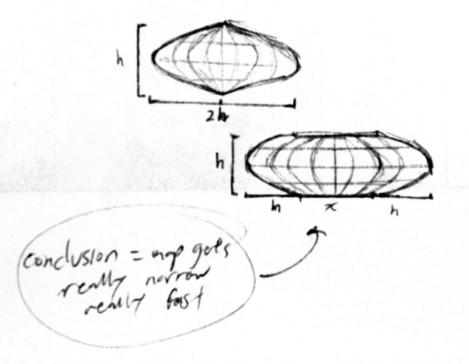
A not actually very informative scan from my scribbles
